2024年4月3日,我校于61号楼5123进行第19届全国大学生交通运输科技大赛校内选拔赛,多组本科生赛道,研究生赛道参赛队伍脱颖而出。
其中,有来自于本部和烟台研究院的多组队伍参赛,本部采取线下答辩模式,烟台研究院采取线上答辩模式。
重溟海韵——适用海洋交通的新型多尺度宽温域Fe基超弹性减振降噪材料团队提出Co元素合金化、循环热处理(CHT)和定向再结晶(DR)等多工艺耦合技术。调控γ相形态提高晶界迁移驱动力,控制亚晶密度区-晶界(LDZ-GB)关系降低诱发异常晶粒(AGs)频率,优化晶界特征、降低马氏体相变阻碍,开发出一种多尺度宽温域的寡晶/单晶FeMnAlNiCo超弹性减振降噪合金。在拓宽应用范围至大型结构件的同时也表现出优异的超弹性能,保障其服役的安全性、稳定性和可靠性,为舰船和海洋平台等的振动控制问题提供了解决途径,实现水上交通安全有序、便捷高效,最大程度减少船舶对环境影响,推动形成航运业与自然生态和谐共生的绿色发展模式,为守护‘碧海蓝天’作出贡献,助力海洋交通建设。

基于微型燃气轮机的水下无人潜航器推进系统团队,自主研发出了一种微燃增程式水下无人航行器,大大增加了无人水下航行器的可持续航行里程。在整个航行过程中,团队设计的微燃增程式水下无人航行器以其独特的、结构设计、无人水下航行器全新动力源和新型的传动机构的相互配合,保证了无人水下航行器的续航里程,为水下无人航行器的发展方向提供了一种全新的思路。

醇净深蓝——船用醇柴动力发动机电控系统团队提出了多缸多区域并行计算建模方法,发明了基于神经网络的双燃料发动机自适应控制方法,创新地提出了基于燃料区域间传递的发动机建模方法,发明了系统故障状态功能重构控制方法,构建了基于总线数据共享的多机冗余系统架构。提出基于压力波理论的喷油量修正方法,配合永磁并联复合磁路电磁阀,大幅度提高了燃料喷射的一致性、动态响应及可靠性,提出动力系统一体化控制策略、燃料喷射始点反馈一致性控制方法,解决了双燃料模式下燃料喷射波动大等问题。
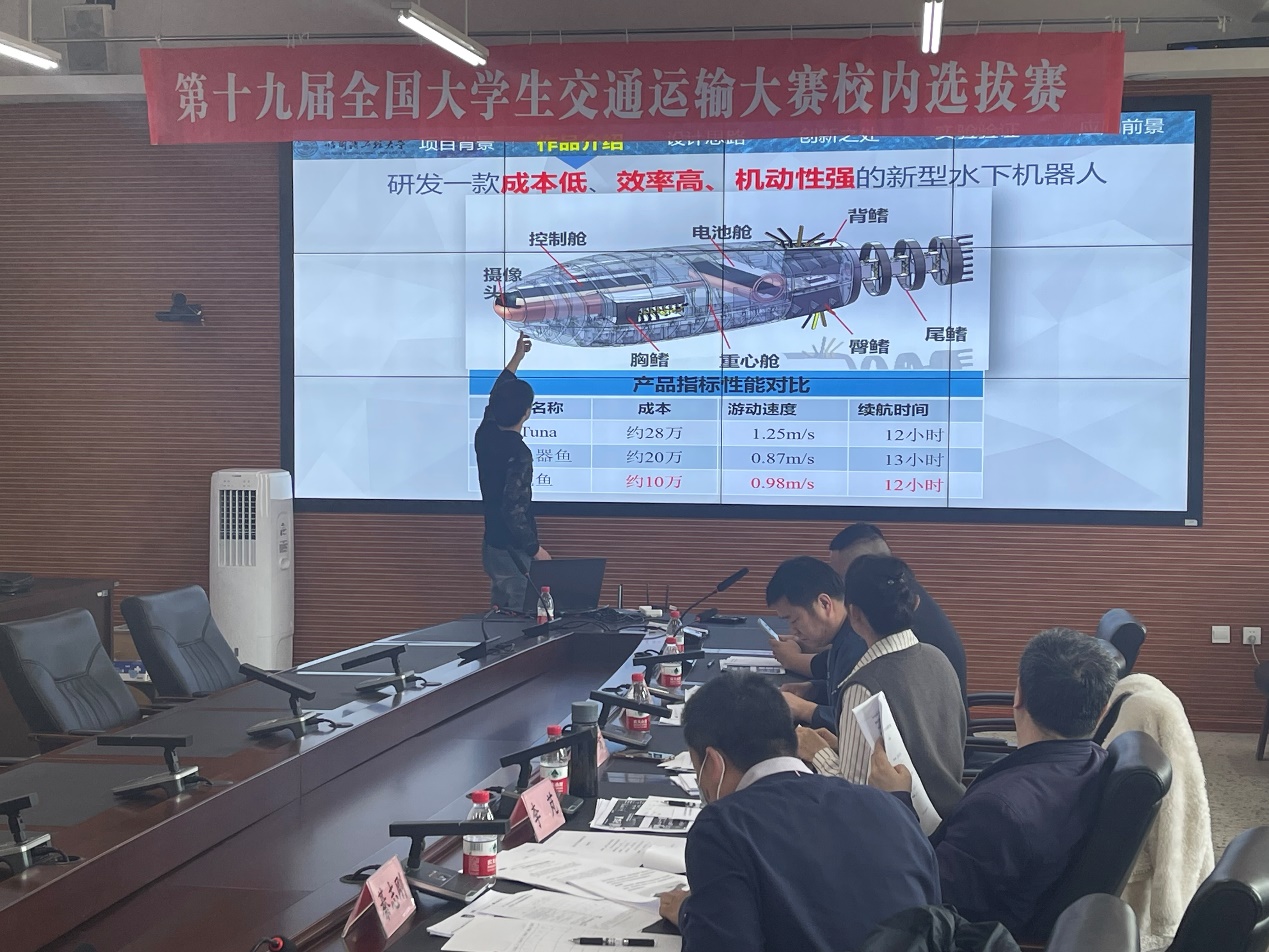
基于鱼鳍组合控制的仿生鲀鱼团队模仿鱼类尾部运动的方式,以提供前进的动力和对航向的精确控制,同时使用固定的翼代替了鳍结构。为了深入研究鱼类在运动过程中鳍的作用,团队设计并开发了这款仿生鱼型水下航行器。与此同时,还采取了一项大胆的举措,去除了传统的压载水仓部分,并利用重心移动和尾部推进来实现鱼类的上升和下潜。

基于混频调制的电缆故障定位系统设计团队采用扩展频谱时域反射法,依据高频伪随机序列信号对线缆阻抗变化的敏感性,调制检测信号,设计数模转换和高频信号放大电路,设计高频采集电路,优化数据处理算法,获取故障位置信息。提出混合调制,获取到宽频域故障信息,解决了现有故障定位方法在增大检测距离则会导致盲区变大和精度降低的矛盾。实现了宽范围检测的同时提高了定位精度。

服务深远海立体组网的一种小型漂浮式供电绿岛样机及其数智化平台研制团队从数智化平台研制入手,结合模型预测控制、图-Mamba改进模型,AK-YOLOV8、QT数据库等预测模型和数字化技术,构建起包含智慧调度,故障预测、视觉故障检测等技术为一体的项目框架。AK-YOLOV8框架为绿岛提供了视觉检测设备故障和极端海况的手段。针对平台数据特点设计图-Mamba模型与模型预测控制结合为平台智能调度、智慧运行提供支持。最终通过QT数据库等技术向使用者提供从数据监控到功率预测各项供能的数智化软件平台。团队针对平台特点和需求设计以图-Mamba模型、AK-YOLOV8为代表的多项子技术,较其他传统技术而言适配性更强,在多项改进的子技术的支持下提出数智化软件平台,为管理者提供诸如智慧调度,故障预测、功率预测、可视化展示为一体的解决方案,较传统供电绿岛更加智能化,对管理行为更加人性化。
祝贺所有校内选拔赛脱颖而出的团队,预祝各团队在全国大赛取得优异成绩!