项目介绍
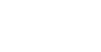
本项目围绕哈尔滨工程大学“济海追风”实验室第二十届全国大学生智能汽车竞赛独轮信标组展开,面向复杂赛道环境下的自主稳定行驶需求,构建了一套集视觉感知、姿态解算、运动控制、参数整定与实车测试于一体的独轮智能车系统。项目持续迭代,实现了从嵌入式底层驱动到整车闭环控制的完整技术链路。
系统以 AURIX/TC38x平台为核心,融合摄像头赛道感知、IMU姿态估计、电机驱动控制和车载菜单调参机制,在资源受限的嵌入式环境中完成赛道信息提取、姿态稳定保持和控制目标实时更新。项目不是单一模块的堆叠,而是围绕“感知—决策—控制—验证”形成的完整工程实践,体现了独轮信标组在智能车系统设计、算法落地和整车联调方面的系统化能力。
研究背景及意义
独轮智能车兼具非线性强、耦合程度高、动态稳定裕度小等典型特征,是智能控制与嵌入式系统领域极具代表性的综合实践对象。相较于传统多轮平台,独轮结构对姿态稳定、路径跟踪、传感器协同和控制实时性提出了更高要求,因此在高校科技创新训练中具有较强的研究价值和工程挑战性。
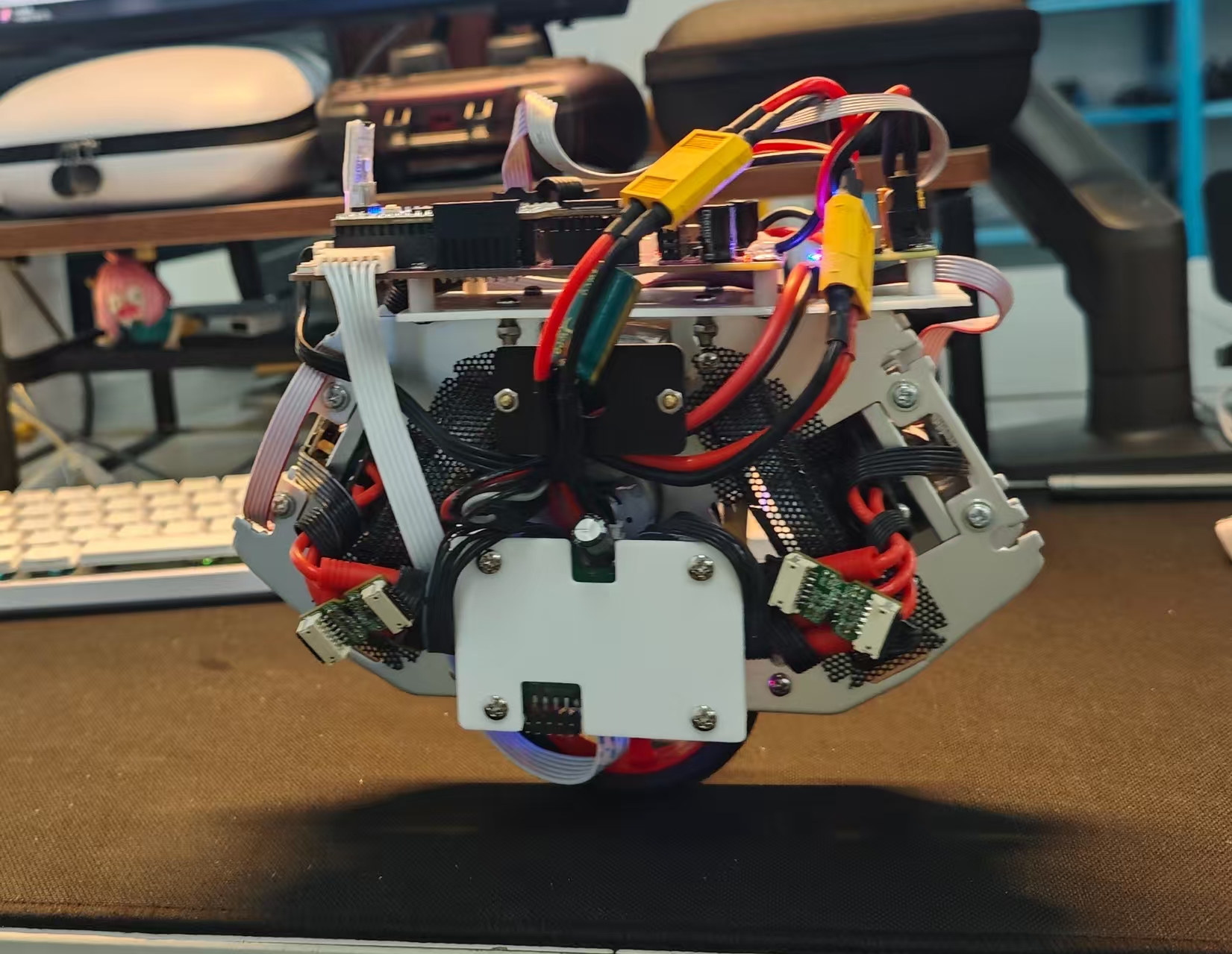
在全国大学生智能汽车竞赛持续向高复杂度、高集成度方向演进的背景下,独轮信标组项目不仅是竞赛攻关的重要载体,也是训练学生开展系统级研发的重要平台。团队成员需要同时理解硬件接口、图像处理、姿态估计、控制算法和整车标定流程,才能完成从代码实现到实车稳定运行的闭环验证。项目的持续推进,有助于提升学生面向真实复杂系统的工程分析能力、协同开发能力和问题迭代能力,也为实验室在智能感知与运动控制方向的人才培养积累了可迁移的经验。
项目创新点
1.感知与控制深度耦合的独轮系统方案
项目并非将视觉、姿态和控制模块割裂设计,而是围绕整车稳定性建立共享状态驱动机制。视觉处理结果直接参与控制目标更新,IMU姿态状态持续反馈到闭环控制链路中,使赛道识别、车体平衡和方向修正形成紧密联动,增强了复杂赛道场景下的系统响应能力。
2.面向嵌入式实时约束的轻量化实现路径
依托 AURIX平台与定时入口控制框架,项目在有限算力条件下完成图像阈值化、连通域分析、姿态解算、滤波与多环控制协同运行,实现了较高集成度下的稳定执行。这种从算法思路到嵌入式部署的一体化实现,体现了团队将理论方法转化为可运行工程系统的能力。
3.多源传感协同下的姿态稳定与赛道跟踪机制
系统综合利用摄像头与 IMU数据,分别承担赛道偏差提取与车体姿态估计任务,通过滤波、阈值判定和闭环调节完成对目标速度、转向和姿态量的动态修正。该机制提升了独轮平台在高速运动与扰动条件下的稳定性,也增强了对赛道变化的适应能力。
4.具备工程迭代特征的在线调参与测试体系
项目内置菜单调参、参数存储和测试模式切换机制,可在实车环境下快速完成参数整定、状态观测与策略验证,减少“改代码—重新烧录—重复试错”的调试成本。该设计让竞赛开发流程更加工程化,也提高了团队联调效率和经验沉淀能力。
团队介绍
“济海追风”智能车团队成立于2006年,隶属于哈尔滨工程大学智能科学与工程学院,连续二十年参加全国大学生智能汽车竞赛。团队长期坚持跨学科协同培养,围绕机械结构、嵌入式开发、感知算法、运动控制与整车调试组织学生开展系统训练,形成了较为成熟的“老带新”培养机制与项目攻关模式。
第二十届独轮信标组是团队竞赛体系中的重要组成部分。成员围绕独轮平台的稳定控制与赛道自主运行开展持续攻关,在真实赛道条件下完成模型设计、程序开发、整车调试和现场优化,体现出较强的工程执行力与协同作战能力。依托实验室长期积累的技术传承和训练机制,团队能够把历届竞赛经验沉淀为可复用的方法论,支持新成员快速进入系统研发状态。
在第二十届全国大学生智能汽车竞赛中,济海追风实验室独轮信标组获全国二等奖,体现了团队在视觉感知、姿态控制与整车联调方面的扎实基础和稳定发挥。
近年来,团队在全国大学生智能汽车竞赛中持续取得优异成绩。2024年,第十九届赛事中获得东北区域赛冠军2项、亚军2项,全国一等奖4项、二等奖2项、三等奖1项,总成绩位列全国606所参赛高校第五名;2025年,团队在第二十届赛事中继续取得平衡轮腿组、气垫越野组、微缩光电组一等奖,以及独轮信标组、双车跟随组二等奖等成绩。团队还获评“2023—2024年度中国大学生自强之星”科创团体,体现了其在科技创新、组织建设与育人成效方面的综合影响力。