项目介绍:
本项目聚焦团队自研的篮球投篮训练机器人与篮球扣篮训练机器人协同系统,以“智能协作赋能运动训练”为核心,直观呈现机器人在篮球攻防场景下的技术创新与应用价值。
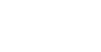
其中,作为攻防协作核心得分单元的投篮机器人,在硬件与算法设计上凸显精准化优势:底盘采用舵轮结构,可实现360度全向移动,灵活适配比赛场地内不同投篮区域的位置切换需求;定位层面搭载MID360设备,能快速捕捉全场环境并识别篮筐点云特征,精准获取目标坐标数据;在投篮控制环节,系统将篮筐XY坐标代入预设的投篮拟合函数,通过算法解算出适配该位置的最佳投篮力度,确保投射精度,有效支撑2分、3分区域的稳定得分。
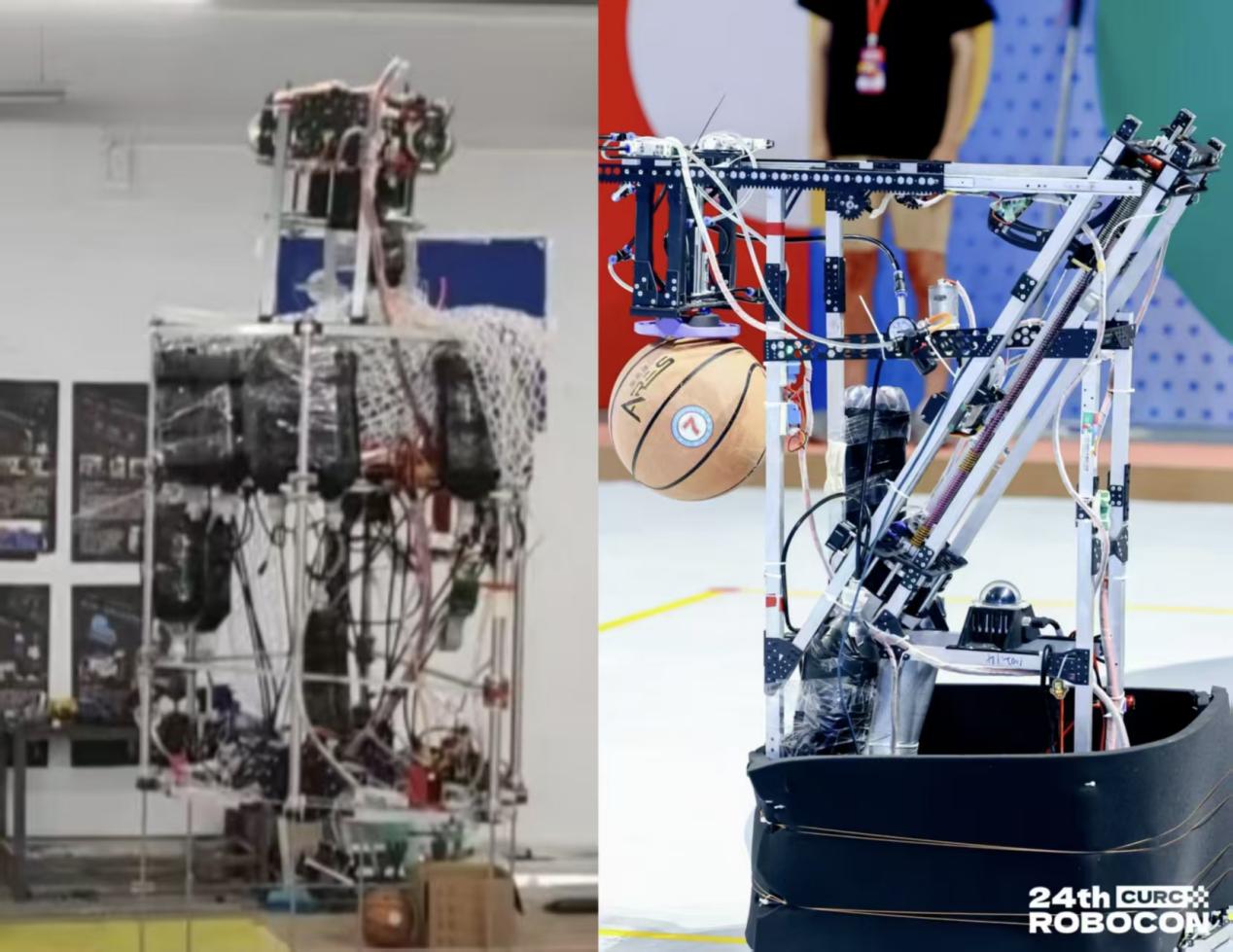
扣篮训练机器人则依托轻量化机械臂与高扭矩驱动单元,模拟“飞身扣篮”动作,同时具备防守拦截功能。两台机器人可通过无线通信模块实时交互数据,攻方阶段完成“传球-投篮/扣篮”的战术衔接,守方阶段扣篮机器人切换拦截模式,形成完整的攻防闭环,复现真实篮球运动中的协作逻辑。
研究背景及意义:
当前体育训练智能化需求攀升,传统篮球训练存在人工指导效率低、攻防场景复现难等问题,且多机器人协同在该领域应用较少。同时,ROBOCON等赛事对机器人精准操作、动态协作提出更高要求,团队据此研发篮球攻防协作机器人系统。该系统不仅突破投篮机器人舵轮移动、MID360定位等技术难点,为运动类机器人提供设计参考,还能通过量化训练数据、模拟攻防场景,推动篮球训练向标准化转型,兼具技术创新与体育应用价值,在科创展示中也可科普机器人技术,激发科创兴趣。
篮球攻防协作机器人系统项目创新点
1. 扣篮机器人动力与动作协同创新:采用气缸联合起跳设计,最高离地高度可达1M,搭配A1电机与4216无刷电机分工驱动,分别实现平射扣篮与仰射投篮动作,兼顾扣篮爆发力与投篮多样性,满足攻防场景下不同得分需求。
2. 扣篮机器人安全落地技术创新:引入先导式节流阀控制气缸回弹速度,精准调节落地缓冲力度,有效避免机器人硬着陆导致的结构损伤,提升设备运行稳定性与使用寿命。
3. 投篮机器人精准控制体系创新:R1机器人以舵轮底盘实现360度全向移动,结合MID360全场定位识别篮筐点云特征,通过“坐标代入-拟合函数解算”模式确定最佳投篮力度,构建“移动-定位-投射”全流程精准控制链路,保障得分效率。
4. 双机器人攻防协作模式创新:打破单一机器人功能局限,投篮机器人与扣篮机器人通过无线通信实现数据交互,可动态切换“传球-得分”进攻衔接与“拦截-防守”角色,复现真实篮球攻防逻辑,形成协同化智能运动系统。
团队介绍:
哈工程竞技机器人队于 2002 年建队,至今已有 23 年历史,23 年来培养了很多优秀的成员。目前团队发展态势良好,成员人数多覆盖面广,主要成员为智能科学与工程学院、船舶工程学院、机电工程学院等学院的各个年级的研究生、本科生。团队内部主要分为机械、控制、硬件、视觉感知、运营五个部门,团队主要参加全国大学生机器人大赛 ROBOCON 赛事、全国大学生电子设计竞赛、高教社杯全国大学生先进成图设计大赛等国内高水平赛事。在全国大学生机器人大赛 ROBOCON赛事中,团队曾获得一次国际季军,两次国内亚军,多次一等奖的好成绩,也曾多次获最佳表演奖、最佳组织奖的奖项。

“科创展台”系列活动是智能学院院科协长期开放的“科创窗口”,专为热爱探索的你敞开。每一次展示,都是一次将创新成果转化为实践经验的珍贵契机;每一次亲历,都可能成为未来科研攻关或竞赛突破的起点。欢迎关注我们的“科创天地”平台,实时获取后续展示动态——下一场创新盛宴,期待与你共同见证创意落地、智慧生花的精彩时刻!