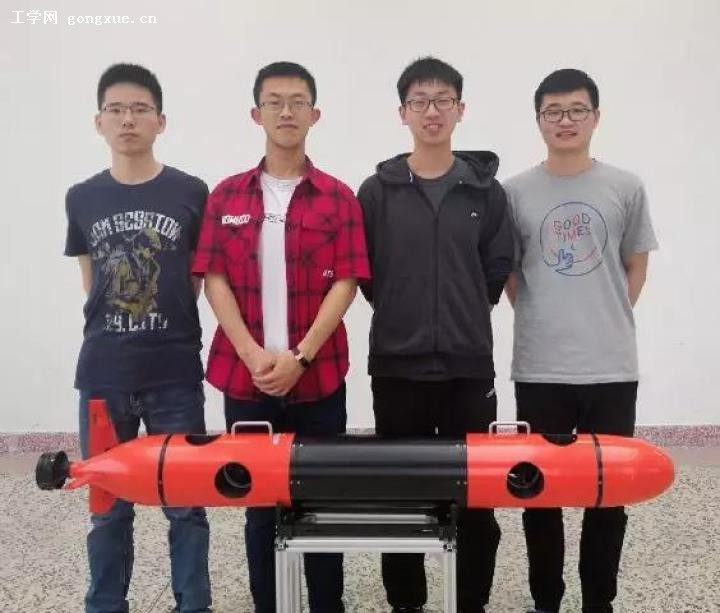
龙头新闻讯(记者朱莉)2018年的国际水下机器人大赛,哈工程学子携“敖小八”登顶世界冠军,惊艳了世界的目光。今年6月的毕业季,哈工程船舶学院大四学生田恩农、孙祥仁用5个月时间打造而成的毕业设计——一个名叫“鱼翔”的水下机器人再度惊艳了众人的目光。记者看到,“鱼翔”身长1米6,体重34斤,在水下机器人家族中是个小个子。正因为身材娇小,它可以更灵活地上浮、下潜、转弯,较一般水下机器人具有更好的操纵性与稳定性,可用于水下自主跟踪、识别。“鱼翔”的诞生,为哈工程水下机器人技术国家级重点实验室再添一名低成本、便携式的新丁。

田恩农是哈工程船舶学院2015级本科生,即将本科毕业的他目前已获得哈工程船舶学院直博资格。本科四年期间,他曾获得全国海洋航行器设计与制作大赛特等奖、一等奖,国际水中机器人大赛一等奖等。在“鱼翔”水下机器人中负责控制系统设计,主要任务包括硬件电路的设计制作,软件系统设计与算法调试等。 孙祥仁是哈工程船舶学院2015级本科生,和田恩农一样,即将本科毕业的他目前也已获得了哈工程船舶学院直博资格。本科四年期间,他曾获国际水下机器人竞赛世界冠军,全国海洋航行器设计与制作大赛特等奖,中国机器人大赛冠军。在“鱼翔”水下机器人中负责总体设计,主要任务包括机器人总布置设计、结构详细设计、流体水动力分析等。

据田恩农、孙祥仁介绍,“鱼翔”这个名字取自《沁园春·长沙》中的诗句“鹰击长空,鱼翔浅底,万类霜天竞自由。”体现了俩人投身建设海洋事业的决心。“鱼翔”是便携式的桨舵复合式水下机器人,采取桨舵复合式航行模式,使其处于较高航速下具有较高的航行效率,可以更好地原地转艏上浮下潜、水平侧移、转弯,兼顾运动性能与续航力,较一般水下机器人具有更好的操纵性与稳定性。机器人外壳采用非水密壳体采用碳纤维材料,强度高,重量轻,水密壳体采用铝合金材质,具有良好的水密性能与抗压性能。搭载有电子陀螺仪,水深传感器,可以获得自身姿态信息,以稳定自身姿态,深度。配有安全检测系统;配有前视摄像头、下视双目摄像头,用于识别、跟踪、水下管线检测。

从去年10月开始,田恩农、孙祥仁在导师李晔教授的指导下,开始了“鱼翔”的论证研发。先后进行了机器人外形设计、推进器的选型、电控系统的设计、水密舱的加工订制、机器人电池组的选型等各环节的工作。他们将总体设计方案在每周实验室的例会中向实验室师生作汇报,大家积极给出优化建议。在动手制作过程,首先进行碳纤维外壳的制作。他们一层一层地糊碳纤维,为了表面的光滑平整,一遍一遍地刮原子灰,同时完成电控方面运动控制系统的设计制作和水密舱的订制。历经3个多月,完成外壳制作和喷漆。再一环扣一环地连上各个舱段,安装上推进器。
当看着机器人完成整体配装,在自己手中诞生的那一刻,激动和欣慰让他们数月来的疲惫都烟消云散了。接着进入了电控系统完善、测试阶段。他们天天抱着电脑,跑到军工操场或者南体测试天线效果,大约两周时间,终于使天线达到了使用标准。再用一周完成控制系统中的安全检测系统和运动控制算法等,进而进行了机器人浮态的调节后,机器人很快地下水了。最后用一个月进行机器人水下运动参数的调试,使机器人的运动效果在水池中达到最好的效果。在调试参数时,机器人也曾疯跑,也曾沉底,两位同学划着小船,撑着长杆将其赶回岸边。
在机器人的制作过程中,他们得到导师李晔技术和经费上的全方位支持,尤其是在天线测试阶段,为他们提供了很多方法;在水池调节阶段,为他们细心讲解舵翼控制模式下算法的细节与参数调试的技巧。在机器人的视觉检测和水池调试阶段,得到了实验室师兄徐硕和凌宇的帮助。毕设作品的完成,既为两位同学的本科四年专业学习、科创活动的融合、积累画上一个完美的句点,又为他们研究生阶段科研撑开启航的风帆。(照片由本人提供)
原文链接:https://h5.newaircloud.com/detailArticle?sid=ltxw&newsId=7615461_33572_ltxw